|
|

|

|
| e-Pub |
Section: New Results
Modelling and Identification
Emergence of Motor Synergy in Reaching Task via Tacit Learning -computational motor control
Participants : Mitsuhiro Hayashibe, Shingo Shimoda [RIKEN,Japan] .
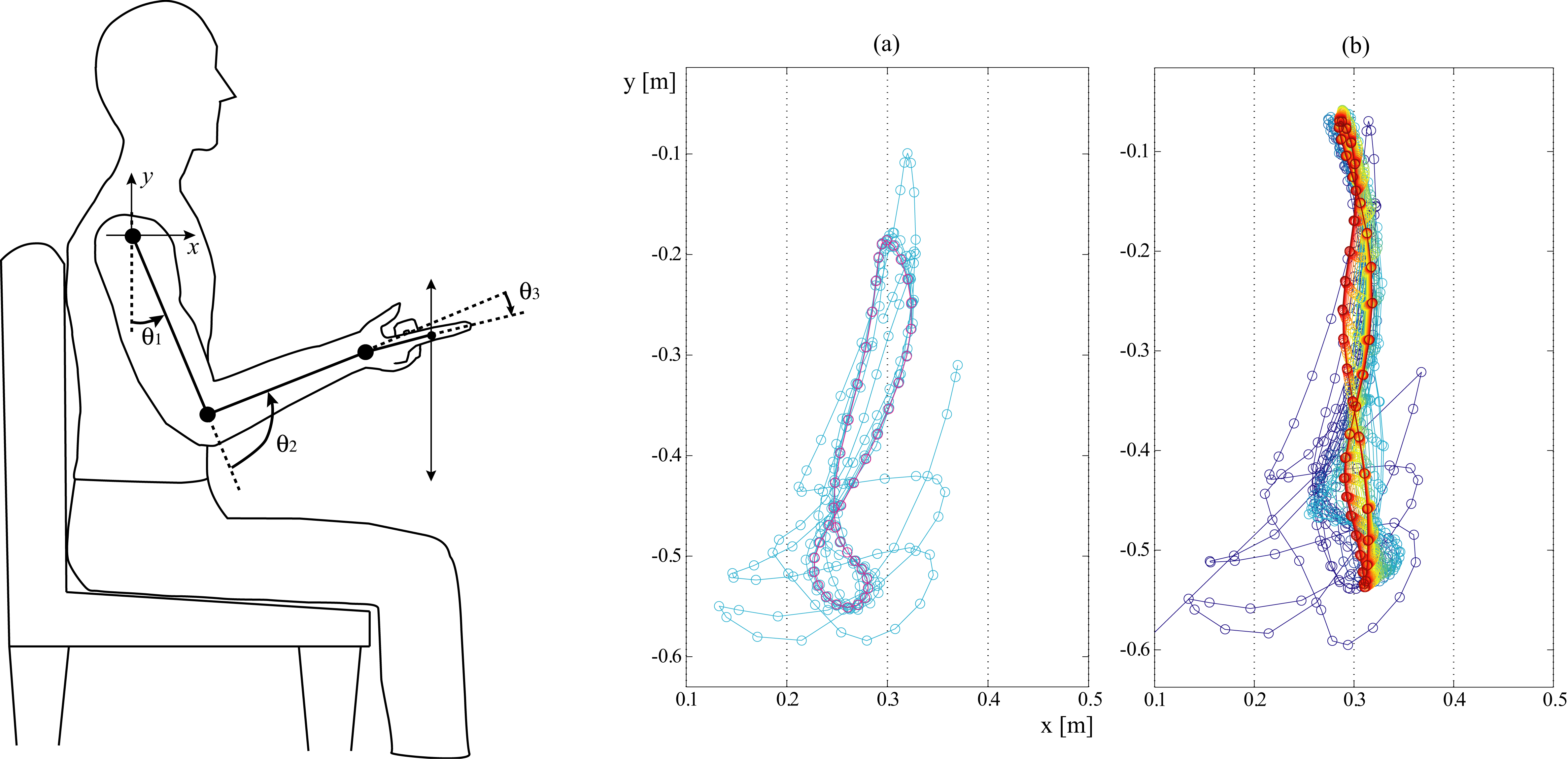
The dynamics of multijoint limbs often causes complex dynamic interaction torques which are the inertial effect of other joints motion. It is known that Cerebellum takes important role in a motor learning by developing the internal model. We propose a novel computational control paradigm in vertical reaching task which involves the management of interaction torques and gravitational effect. The obtained results demonstrate that the proposed method is valid for acquiring motor synergy in the system with actuation redundancy and resulted in the energy efficient solutions. It is highlighted that the tacit learning in vertical reaching task can bring computational adaptability and optimality with model-free and cost-function-free approach differently from previous studies.
|
Anatomy Transfer
Participants : Dicko Ali-Hamadi, Tiantian Liu, Benjamin Gilles, Ladislav Kavan, Francois Faure, Olivier Palombi, Marie-Paule Cani.
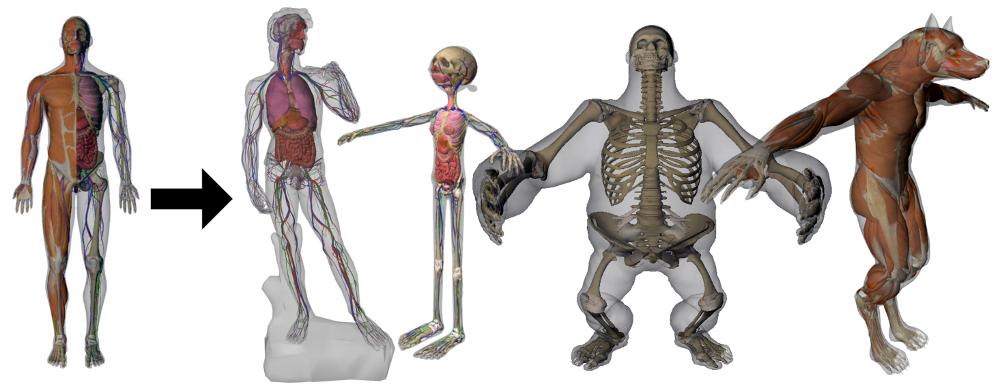
Characters with precise internal anatomy are important in film and visual effects, as well as in medical applications. We propose the first semi-automatic method for creating anatomical structures, such as bones, muscles, viscera and fat tissues. This is done by transferring a reference anatomical model from an input template to an arbitrary target character, only defined by its boundary representation (skin). The fat distribution of the target character needs to be specified. We can either infer this information from MRI data, or allow the users to express their creative intent through a new editing tool. The rest of our method runs automatically: it first transfers the bones to the target character, while maintaining their structure as much as possible. The bone layer, along with the target skin eroded using the fat thickness information, are then used to define a volume where we map the internal anatomy of the source model using harmonic (Laplacian) deformation. This way, we are able to quickly generate anatomical models for a large range of target characters, while maintaining anatomical constraints.
|
Center of Mass Estimation in Multicontact Situations: Simulation
Participants : Alejandro González, Mitsuhiro Hayashibe, Emel Demircan [Stanford Univ.] , Philippe Fraisse.
Center of mass (CoM) estimation can be used to evaluate human stability during rehabilitation. A personalized estimation can be obtained using the serial equivalent static chain (SESC) method, calibrated using a series of static postures. The estimation accuracy is dependent on the number and quality of poses used during calibration. Currently, this limits the method's application to unimpaired individuals. We present a preliminary study of a SESC identified in a multi-contact scenario during a Sit-to-Stand task. Stanford's SAI (Simulation and Active Interface) platform was used to emulate human motion and predict relevant reaction forces. The CoM estimation obtained is valid for motions similar to those used during identification. Since the SAI's human model is fully defined, in terms of mass and limb lenths, its exact center of mass is known. Using a 3-dimensional model, the estimated mean error was less than 26 mm for a Sit-to-Stand task involving displacements along all axes. As such, personalized CoM estimation can be available for patients with a limited range of whole body motion.
|
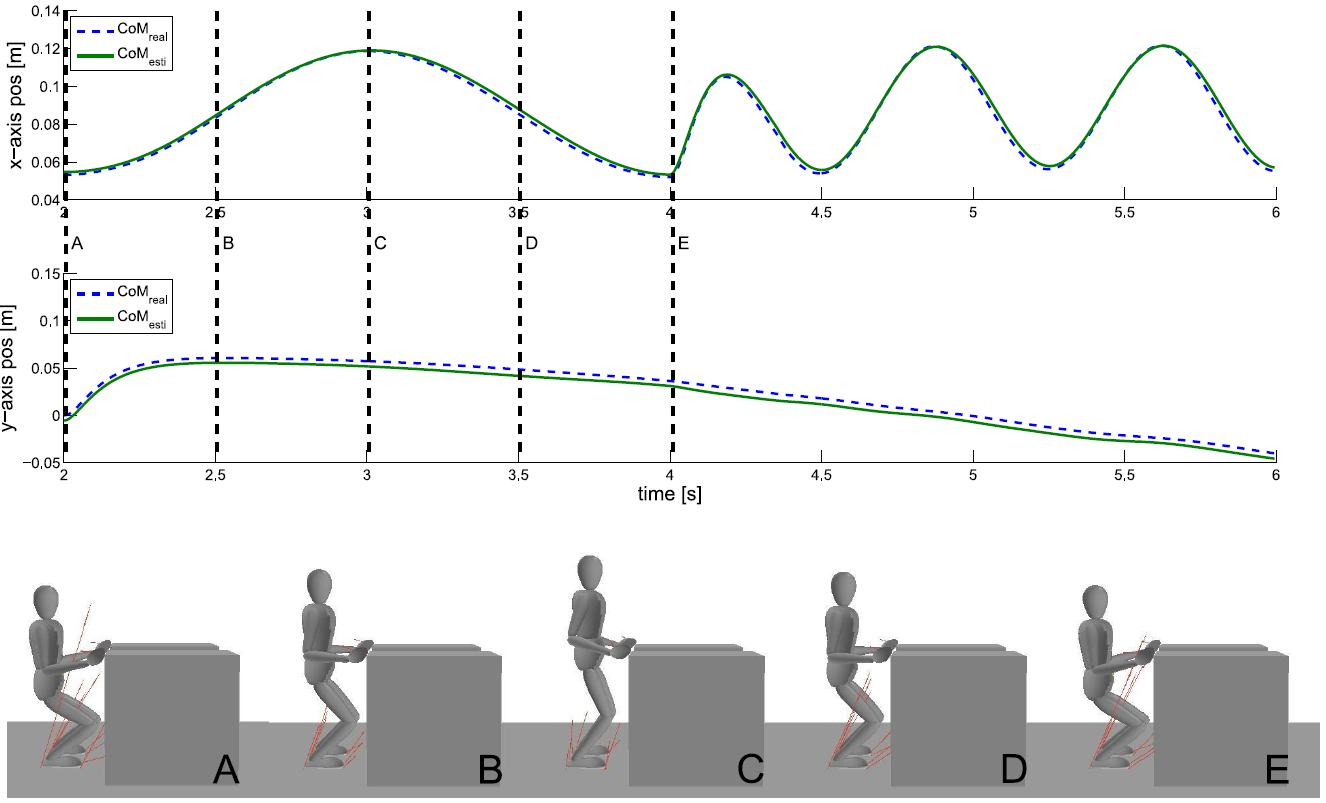
Fig. 3 shows the identification results [27] . Even with a limited motion, it was possible to estimate the position of the simulated robot's CoM projected to onto the ground. This estimation errors are likely due to the lack of an exciting trajectory for identification. Nonetheless, if the postures used during identification describe a patient's range of motion, the CoM estimation can still be valuable.
Interface for identification of the Statically Equivalent Serial Chain's parameters and Balance Assessment
Participants : Alejandro González, Mitsuhiro Hayashibe, Philippe Fraisse.
CoM trajectory can be used to improve the current rehabilitation standards. After an identification phase, a personalized CoM estimate can be obtained using a SESC. Furthermore, using low-cost sensors (Kinect and Wii balance board), make the personalized estimate feasible inside a patient's home. This work focuses on the effect that a visual adaptive interface can have on the SESC identification phase. Specifically on improving its speed and quality. A study conducted on 6 subjects showed a faster convergence and a lower root mean square error (rmse) when the adaptive interface is applied. We find that for the same error (30 mm), the identification with the interface was performed in half the time (86 s) than the one without it (163 s). Similarly, for the same session length (120 s), rmse was of 24.5 mm using the interface and of 34.5 mm without it.
|
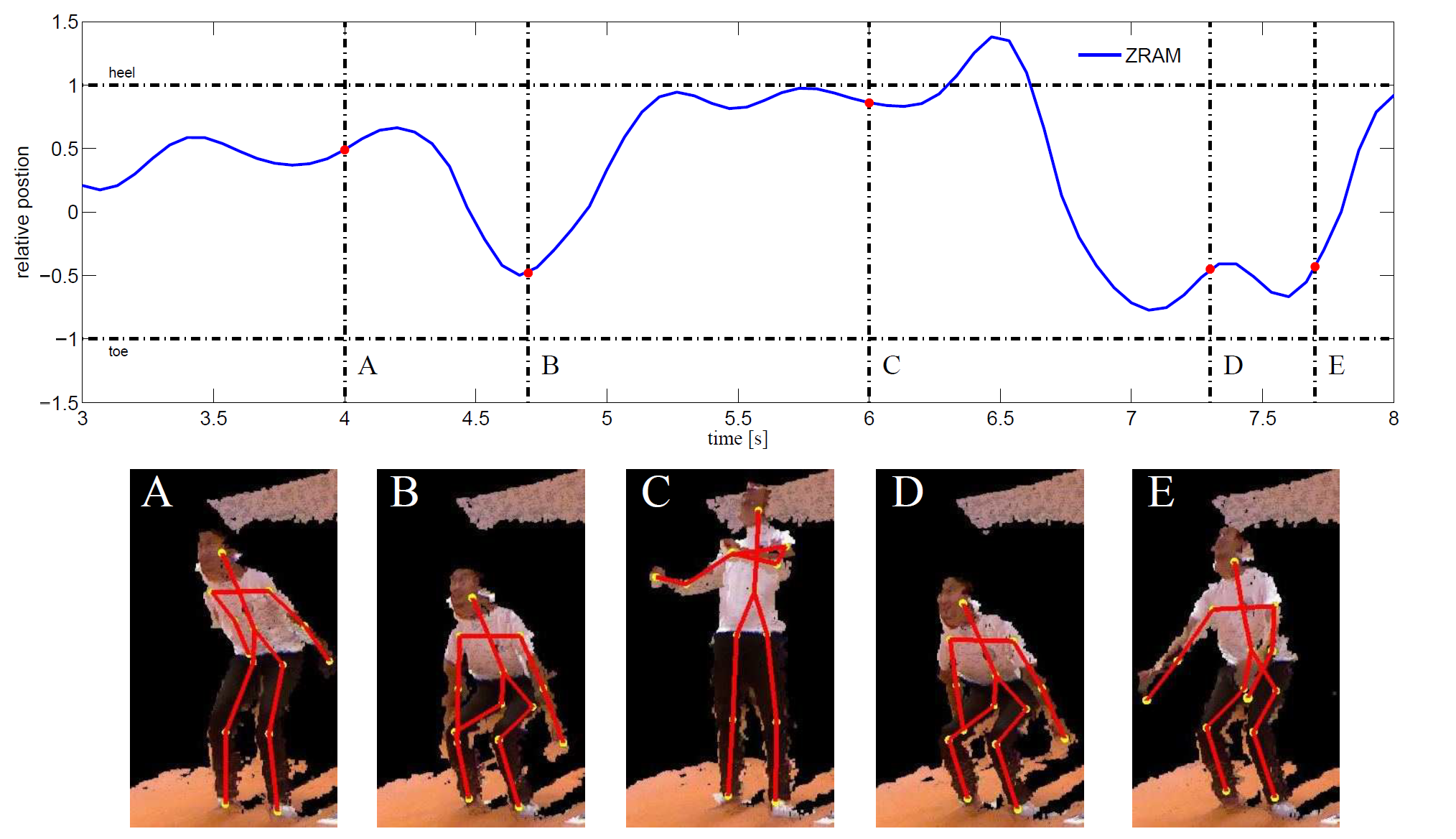
Additionally CoM dynamics may be used to determine stability. Fig. 4 shows an example of this during a squat task. The zero rate of angular momentum (ZRAM) can be used to determine the dynamic stability of a humanoid robot. It can be used to determine the position foot placement to avoid falls.
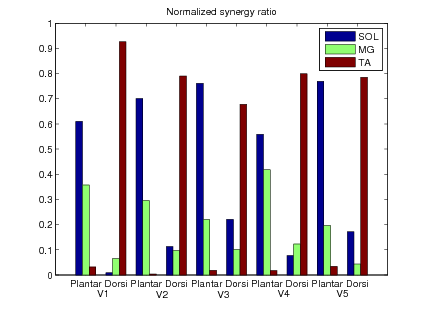
Forward Estimation of Joint Torque from EMG Signal through Muscle Synergy Combinations
Participants : Zhan Li, Mitsuhiro Hayashibe, David Guiraud.
We investigate the approaches of estimating the ankle joint torque from EMG/activations of associated muscle groups. The approaches discussed fall into two main categories: i) full utilization of both of extension and flexion EMG/activations for estimating the joint torque; ii) exploitation of muscle synergy extraction of EMG/actvations and consequent usage of extracted components in reduced space for estimating the joint torque. Comparison is made between the two methods with experimental data of five able-bodied subjects. From the results we conclude that, method ii) with muscle synergy extraction may not degrade the performance of method i) but meanwhile show the muscle synergic ratios for generating the joint torque, and involvement of joint position and velocity information can improve the estimation for both methods.
|
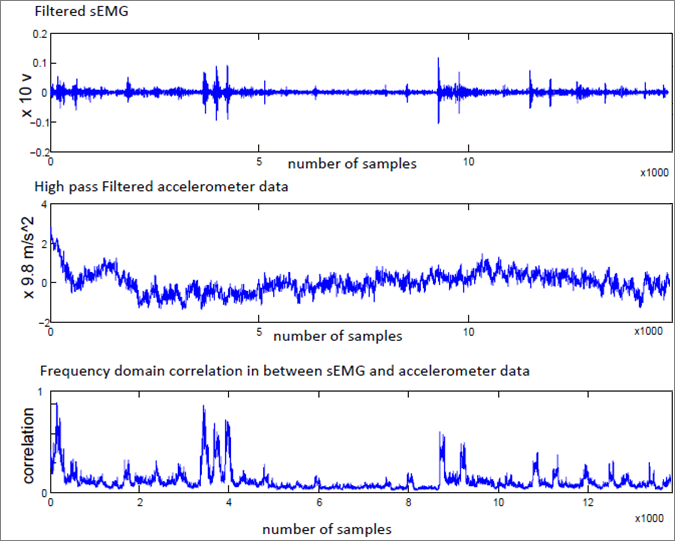
Prediction of hand tremor through EMG-based fatigue tracking
Participants : Sourav Chandra, Mitsuhiro Hayashibe, Thondiyath Asokan [IITMadras, India] .
Laparoscopic surgical procedure is a very tiring procedure for a surgeon due to the specialized prolonged arm movement with a modular tool. Prolonged activity of arm muscle in such condition induces muscle fatigue which induces hand tremor. Hand tremor not only drastically affects positional accuracy; it also increases the collateral tissue damage. Nullification of this tremor has been the area of active research topic in surgical robotics for last few decades. Though Surface ElectroMyoGram (SEMG) has been used for modeling hand tremor of microsugeons, a single model for predicting amplitude and frequency of such tremor has not been investigated for laparoscopy so far. A model of muscle fatigue induced hand tremor in laparoscopic activity is necessary in order to nullify this hand tremor effect and increase positional accuracy. SEMG is a crucial biopotential in order to get the estimation of the muscle fatigue state. A positive correlation was found among sEMG and hand tremor in frequency domain as shown in Fig. 6 below. In this work, a model based prediction of fatigue induced hand tremor will be investigated with the vicinity of SEMG and other wearable inertial sensor data. The model is intended to have a dynamic structure, which can capture the complexity of the muscle fatigue state to some extent and its effect on the hand tremor amplitude and frequency.
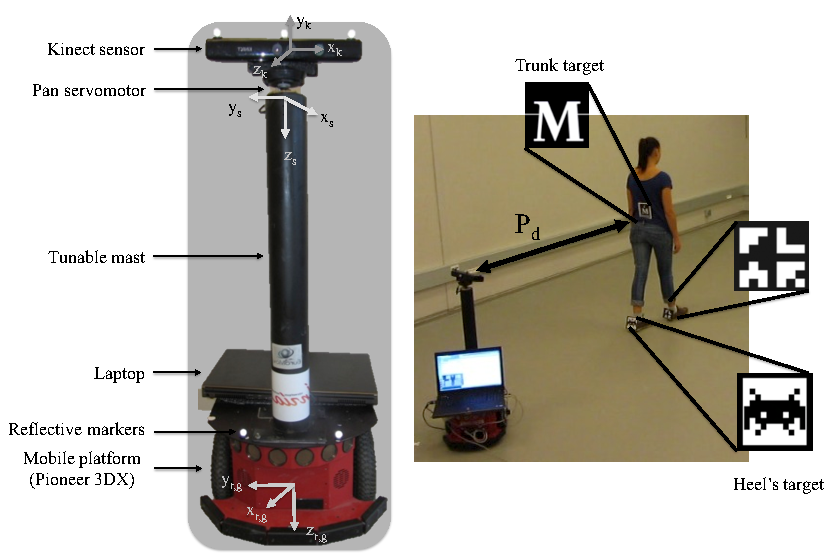
Mobile gait analysis
Participants : Vincent Bonnet [M2H, UM1, Montpellier] , Christine Azevedo Coste, Christian Geny [CHU Montpellier] , Lionel Lapierre [LIRMM, Montpellier] , René Zapata [LIRMM, Montpellier] .
The Video-Kinect-Bot, an affordable mobile platform for pathological gait analysis was developed to assess pathological spatio-temporal parameters. The system, drove by a Kinect sensor, is able to follow a patient at constant distance on his own defined path, and to estimate gait spatio-temporal parameters. Robust Tracking-Learning-Detection algorithm estimates the positions of targets attached to the trunk and heels of the patient. Real-condition experimental validation including corridor, occlusion cases, and illumination change was performed. A gold standard stereophotogrammetric system was also used and shown a good tracking of patient and an accuracy in stride length estimate of 2%.
The Empirical Mode Decomposition (EMD) method was evaluated to estimate the 3D orientation of the lower trunk during walking using the angular velocity signals generated by a wearable inertial measurement unit (IMU) and notably flawed by drift. The IMU was mounted on the lower trunk (L4-L5) with its active axes aligned with the relevant anatomical axes. The proposed method performs an offline analysis but has the advantage of not requiring any parameter tuning. The method was validated in two groups of 15 subjects, one during overground walking, with 180° turnings, and the other during treadmill walking, both for steady-state and transient speeds, using stereophotogrammetric data. Comparative analysis of the results showed that the IMU/EMD method is able to successfully detrend the integrated angular velocities and estimate lateral bending, flexion-extension as well as axial rotations of the lower trunk during walking with RMS errors of 1 deg for straight walking and lower than 2.5 deg for walking with turnings. This work was accepted for publication in Sensors journal for a special issue concerning wearable-sensor for gait analysis in 2014 with the following collaborators V. Bonnet, S. Ramdani, C. Azevedo-Coste, P. Fraisse, C. Mazzà and A. Cappozzo.
Data relative to the pitch, roll and yaw angles obtained for one randomly selected treadmill walking trial. The integrated angular velocities (grey line) and the resulting trends (black line) are estimated using EMD (a) during all the trial; zoom over 20 s on the corresponding detrended angles are thereafter estimated (black line) and compared with those obtained using stereophotogrammetry (grey line).
|
This work is supported by a NOVARTIS funding (see Partnerships and Cooperations section).